Custom Environments
Environment Creation for Simulation Mode
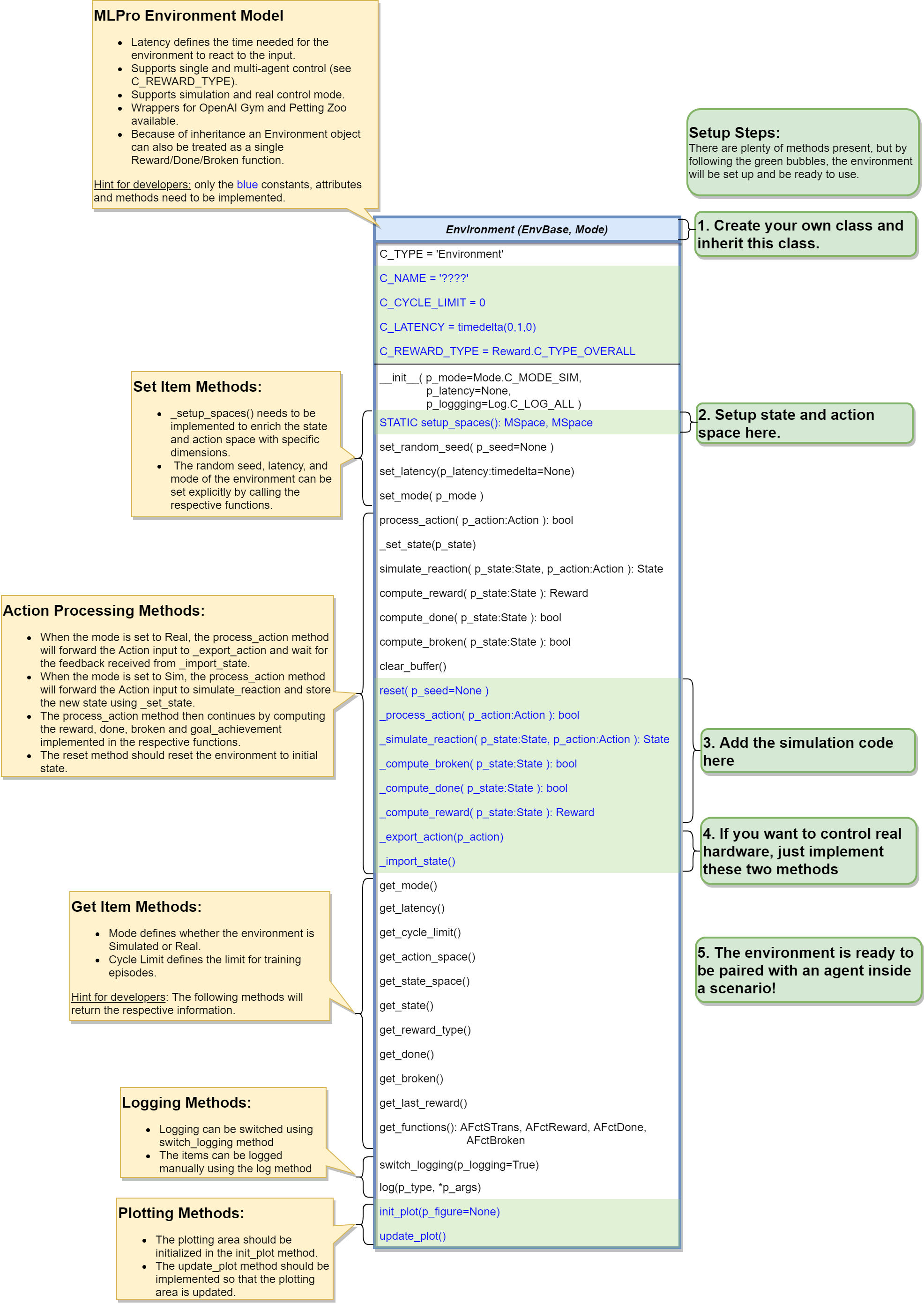
To create an environment that satisfies MLPro interface is immensly simple and straigtforward. Basically a MLPro environment is a class with 5 main functions. Each environment must apply the following mlpro functions:
from mlpro.rl.models import * class MyEnvironment(Environment): """ Custom Environment that satisfies mlpro interface. """ C_NAME = 'MyEnvironment' C_LATENCY = timedelta(0,1,0) # Default latency 1s C_REWARD_TYPE = Reward.C_TYPE_OVERALL # Default reward type def __init__(self, p_mode=C_MODE_SIM, p_latency:timedelta=None, p_logging=True): """ Parameters: p_mode Mode of environment (simulation/real) p_latency Optional: latency of environment. If not provided internal value C_LATENCY will be used by default p_logging Boolean switch for logging """ super().__init__(p_latency=p_latency, p_logging=p_logging) self._setup_spaces() self.set_mode(p_mode) def _setup_spaces(self): """ Implement this method to enrich the state and action space with specific dimensions. """ # Setup state space example # self.state_space.add_dim(Dimension(0, 'Pos', 'Position', '', 'm', 'm', [-50,50])) # self.state_space.add_dim(Dimension(1, 'Vel', 'Velocity', '', 'm/sec', '\frac{m}{sec}', [-50,50])) # Setup action space example # self.action_space.add_dim(Dimension(0, 'Rot', 'Rotation', '', '1/sec', '\frac{1}{sec}', [-50,50])) .... def _simulate_reaction(self, p_action:Action) -> None: """ Simulates a state transition of the environment based on a new action. Please use method set_state() for internal update. Parameters: p_action Action to be processed """ .... def reset(self) -> None: """ Resets environment to initial state. """ .... def compute_reward(self) -> Reward: """ Computes a reward. Returns: Reward object """ .... def _evaluate_state(self) -> None: """ Updates the goal achievement value in [0,1] and the flags done and broken based on the current state. """ # state evaluations example # if self.done: # self.goal_achievement = 1.0 # else: # self.goal_achievement = 0.0 ....
One of the benefits for MLPro users is the variety of reward structures, which is useful for Multi-Agent RL and Game Theoretical approach. Three types of reward structures are supported in this framework, such as:
C_TYPE_OVERALL as the default type and is a scalar overall value
C_TYPE_EVERY_AGENT is a scalar for every agent
C_TYPE_EVERY_ACTION is a scalar for every agent and action.
To set up state- and action-spaces using our basic functionalities, please refer to our how to File 02 or here. Dimension class is currently improved and we will provide the explanation afterwards!
Environment Creation for Real Hardware Mode
In MLPro, we can choose simulation mode or real hardward mode. For real hardware mode, the creation of an environment is very similar to simulation mode. You do not need to define _simulate_reaction, but you need to replace it with _export_action and _import_state as it is shown in the following:
from mlpro.rl.models import * class MyEnvironment(Environment): """ Custom Environment that satisfies mlpro interface. """ C_NAME = 'MyEnvironment' C_LATENCY = timedelta(0,1,0) # Default latency 1s C_REWARD_TYPE = Reward.C_TYPE_OVERALL # Default reward type def __init__(self, p_mode=C_MODE_REAL, p_latency:timedelta=None, p_logging=True): """ Parameters: p_mode Mode of environment (simulation/real) p_latency Optional: latency of environment. If not provided internal value C_LATENCY will be used by default p_logging Boolean switch for logging """ super().__init__(p_latency=p_latency, p_logging=p_logging) self._setup_spaces() self.set_mode(p_mode) def _setup_spaces(self): """ Implement this method to enrich the state and action space with specific dimensions. """ # Setup state space example # self.state_space.add_dim(Dimension(0, 'Pos', 'Position', '', 'm', 'm', [-50,50])) # self.state_space.add_dim(Dimension(1, 'Vel', 'Velocity', '', 'm/sec', '\frac{m}{sec}', [-50,50])) # Setup action space example # self.action_space.add_dim(Dimension(0, 'Rot', 'Rotation', '', '1/sec', '\frac{1}{sec}', [-50,50])) .... def _export_action(self, p_action:Action) -> bool: """ Exports given action to be processed externally (for instance by a real hardware). Parameters: p_action Action to be exported Returns: True, if action export was successful. False otherwise. """ .... def _import_state(self) -> bool: """ Imports state from an external system (for instance a real hardware). Please use method set_state() for internal update. Returns: True, if state import was successful. False otherwise. """ .... def reset(self) -> None: """ Resets environment to initial state. """ .... def compute_reward(self) -> Reward: """ Computes a reward. Returns: Reward object """ .... def _evaluate_state(self) -> None: """ Updates the goal achievement value in [0,1] and the flags done and broken based on the current state. """ # state evaluations example # if self.done: # self.goal_achievement = 1.0 # else: # self.goal_achievement = 0.0 ....
Environment from Third Party Packages
Alternatively, if your environment follows Gym or PettingZoo interface, you can apply our relevant useful wrappers for the integration between third party packages and MLPro. For more information, please click here.
Environment Checker
To check whether your developed environment is compatible to MLPro interface, we provide a test script using unittest. At the moment, you can find the source code here. We will prepare a built-in testing module in MLPro, show you how to excecute the testing soon and provides an example as well.