Howto 13 - (RL) Comparison Native and Wrapper SB3 Policy
Ver. 1.0.7 (2022-03-21)
This module compares the native and wrapped implementation of the SB3 Policy on an environment.
Prerequisites
- Please install the following packages to run this examples properly:
Results
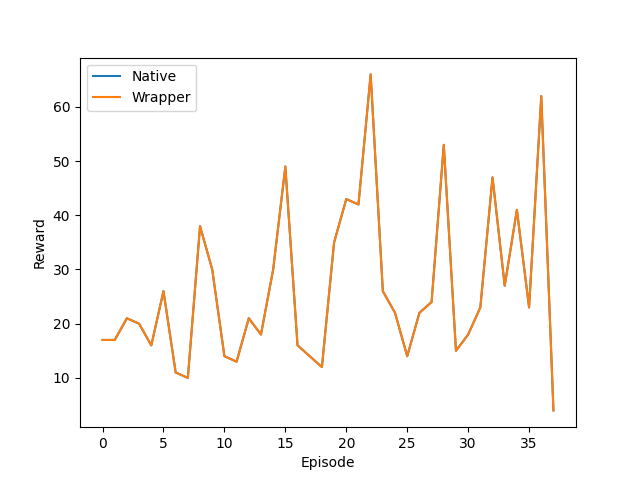
The plot from native and wrapped implementation should be indiscernible between each other. The figure above is an example of successful algorithm wrapping.
Example Code
## -------------------------------------------------------------------------------------------------
## -- Project : FH-SWF Automation Technology - Common Code Base (CCB)
## -- Package : mlpro
## -- Module : Howto 13 - Comparison Native and Wrapper SB3 Policy
## -------------------------------------------------------------------------------------------------
## -- History :
## -- yyyy-mm-dd Ver. Auth. Description
## -- 2021-10-27 0.0.0 MRD Creation
## -- 2021-10-27 1.0.0 MRD Released first version
## -- 2021-11-16 1.0.1 DA Refactoring
## -- 2021-12-07 1.0.2 DA Refactoring
## -- 2021-12-20 1.0.3 DA Refactoring
## -- 2021-12-23 1.0.4 MRD Small change on custom _reset Wrapper
## -- 2021-12-24 1.0.5 DA Replaced separtor in log line by Training.C_LOG_SEPARATOR
## -- 2022-02-27 1.0.6 SY Refactoring due to auto generated ID in class Dimension
## -- 2022-03-21 1.0.7 WB Rewrite module description
## -------------------------------------------------------------------------------------------------
"""
Ver. 1.0.7 (2022-03-21)
This module compares the native and wrapped implementation of the SB3 Policy on an
environment.
"""
import gym
import pandas as pd
import torch
from stable_baselines3 import PPO
from stable_baselines3.common.callbacks import BaseCallback
from mlpro.rl.models import *
from mlpro.wrappers.openai_gym import WrEnvGYM2MLPro
from mlpro.wrappers.sb3 import WrPolicySB32MLPro
from pathlib import Path
# 1 Parameter
# 2 Create scenario and start training
if __name__ == "__main__":
# 2.1 Parameters for demo mode
logging = Log.C_LOG_ALL
visualize = True
path = str(Path.home())
max_episode = 400
else:
# 2.2 Parameters for internal unit test
logging = Log.C_LOG_NOTHING
visualize = False
path = None
max_episode = 200
mva_window = 1
buffer_size = 100
policy_kwargs = dict(activation_fn=torch.nn.Tanh,
net_arch=[dict(pi=[10, 10], vf=[10, 10])])
# 2 Implement your own RL scenario
class MyScenario(RLScenario):
C_NAME = 'Matrix'
def _setup(self, p_mode, p_ada, p_logging):
class CustomWrapperFixedSeed(WrEnvGYM2MLPro):
def _reset(self, p_seed=None):
self.log(self.C_LOG_TYPE_I, 'Reset')
# 1 Reset Gym environment and determine initial state
observation = self._gym_env.reset()
obs = DataObject(observation)
# 2 Create state object from Gym observation
state = State(self._state_space)
state.set_values(obs.get_data())
state.set_success(True)
self._set_state(state)
# 1 Setup environment
gym_env = gym.make('CartPole-v1')
gym_env.seed(1)
# self._env = mlpro_env
self._env = CustomWrapperFixedSeed(gym_env, p_logging=p_logging)
# 2 Instatiate Policy From SB3
# env is set to None, it will be set up later inside the wrapper
# _init_setup_model is set to False, the _setup_model() will be called inside
# the wrapper manually
# PPO
policy_sb3 = PPO(
policy="MlpPolicy",
env=None,
n_steps=buffer_size,
_init_setup_model=False,
policy_kwargs=policy_kwargs,
device="cpu",
seed=1)
# 3 Wrap the policy
self.policy_wrapped = WrPolicySB32MLPro(
p_sb3_policy=policy_sb3,
p_cycle_limit=self._cycle_limit,
p_observation_space=self._env.get_state_space(),
p_action_space=self._env.get_action_space(),
p_ada=p_ada,
p_logging=p_logging)
# 4 Setup standard single-agent with own policy
return Agent(
p_policy=self.policy_wrapped,
p_envmodel=None,
p_name='Smith',
p_ada=p_ada,
p_logging=p_logging
)
# 3 Instantiate training
training = RLTraining(
p_scenario_cls=MyScenario,
p_cycle_limit=1000,
p_collect_states=True,
p_collect_actions=True,
p_collect_rewards=True,
p_collect_eval=True,
p_path=path,
p_visualize=visualize,
p_logging=logging)
# 4 Train SB3 Wrapper
training.run()
# 5 Create Plotting Class
class MyDataPlotting(DataPlotting):
def get_plots(self):
"""
A function to plot data
"""
for name in self.data.names:
maxval = 0
minval = 0
if self.printing[name][0]:
fig = plt.figure(figsize=(7, 7))
raw = []
label = []
ax = fig.subplots(1, 1)
ax.set_title(name)
ax.grid(True, which="both", axis="both")
for fr_id in self.data.frame_id[name]:
raw.append(np.sum(self.data.get_values(name, fr_id)))
if self.printing[name][1] == -1:
maxval = max(raw)
minval = min(raw)
else:
maxval = self.printing[name][2]
minval = self.printing[name][1]
label.append("%s" % fr_id)
ax.plot(raw)
ax.set_ylim(minval - (abs(minval) * 0.1), maxval + (maxval * 0.1))
ax.set_xlabel("Episode")
ax.legend(label, bbox_to_anchor=(1, 0.5), loc="center left")
self.plots[0].append(name)
self.plots[1].append(ax)
if self.showing:
plt.show()
else:
plt.close(fig)
# 6 Plotting 1 MLpro
data_printing = {"Cycle": [False],
"Day": [False],
"Second": [False],
"Microsecond": [False],
"Smith": [True, -1]}
mem = training.get_results().ds_rewards
mem_plot = MyDataPlotting(mem, p_showing=False, p_printing=data_printing)
mem_plot.get_plots()
wrapper_plot = mem_plot.plots
# 7 Create Callback for the SB3 Training
class CustomCallback(BaseCallback, Log):
"""
A custom callback that derives from ``BaseCallback``.
:param verbose: (int) Verbosity level 0: not output 1: info 2: debug
"""
C_TYPE = 'Wrapper'
C_NAME = 'SB3 Policy'
def __init__(self, p_verbose=0):
super(CustomCallback, self).__init__(p_verbose)
reward_space = Set()
reward_space.add_dim(Dimension("Native"))
self.ds_rewards = RLDataStoring(reward_space)
self.episode_num = 0
self.total_cycle = 0
self.cycles = 0
self.plots = None
self.continue_training = True
self.rewards_cnt = []
def _on_training_start(self) -> None:
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR)
self.log(self.C_LOG_TYPE_I, '-- Episode', self.episode_num, 'started...')
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR, '\n')
self.ds_rewards.add_episode(self.episode_num)
def _on_step(self) -> bool:
# With Cycle Limit
self.ds_rewards.memorize_row(self.total_cycle, timedelta(0, 0, 0), self.locals.get("rewards"))
self.total_cycle += 1
self.cycles += 1
if self.locals.get("infos")[0]:
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR)
self.log(self.C_LOG_TYPE_I, '-- Episode', self.episode_num, 'finished after', self.total_cycle + 1,
'cycles')
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR, '\n\n')
self.episode_num += 1
self.total_cycle = 0
self.ds_rewards.add_episode(self.episode_num)
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR)
self.log(self.C_LOG_TYPE_I, '-- Episode', self.episode_num, 'started...')
self.log(self.C_LOG_TYPE_I, Training.C_LOG_SEPARATOR, '\n')
return True
def _on_training_end(self) -> None:
data_printing = {"Cycle": [False],
"Day": [False],
"Second": [False],
"Microsecond": [False],
"Native": [True, -1]}
mem_plot = MyDataPlotting(self.ds_rewards, p_showing=False, p_printing=data_printing)
mem_plot.get_plots()
self.plots = mem_plot.plots
# 8 Run the SB3 Training Native
gym_env = gym.make('CartPole-v1')
gym_env.seed(1)
policy_sb3 = PPO(
policy="MlpPolicy",
env=gym_env,
n_steps=buffer_size,
verbose=0,
policy_kwargs=policy_kwargs,
device="cpu",
seed=1)
cus_callback = CustomCallback()
policy_sb3.learn(total_timesteps=1000, callback=cus_callback)
native_plot = cus_callback.plots
# 9 Difference Plot
native_ydata = native_plot[1][0].lines[0].get_ydata()
wrapper_ydata = wrapper_plot[1][0].lines[0].get_ydata()
smoothed_native = pd.Series.rolling(pd.Series(native_ydata), mva_window).mean()
smoothed_native = [elem for elem in smoothed_native]
smoothed_wrapper = pd.Series.rolling(pd.Series(wrapper_ydata), mva_window).mean()
smoothed_wrapper = [elem for elem in smoothed_wrapper]
plt.plot(smoothed_native, label="Native")
plt.plot(smoothed_wrapper, label="Wrapper")
plt.xlabel("Episode")
plt.ylabel("Reward")
plt.legend()
if __name__ == "__main__":
plt.show()