Multi Geometry Robot
This Multi Geometry Robot environment can be installed via:
import mlpro.rl.pool.envs.multigeorobot
- 3rd Party Dependencies
The environment has been tested in Ubuntu 20.04 running ROS Noetic.
- The installation steps are as follow:
Install Ubuntu 20.04
Install ROS
Install Moveit
- Install Dependencies:
- Build the Environment:
- Source the package:
- Change the ros_ws_abspath parameter in:
Overview
General information
Building a robot model in URDF format can be a painful work, if you do not know what you are doing. Especially when the model is complex. Multi Geometry Robot environment provides an easy way to build your own robot with a predefined configuration. This way, the user do not have to take care of the robot model. All the configurations are automatically built. The robot is also attached with a robotiq gripper. The robot can be configured in:
MLPro/src/mlpro/rl/pool/envs/multigeorobot/src/multi_geo_robot_rl/multi_geo_robot_training/config/multi_geo_robot.yamlBelow are the parameters on above mentioned file that can be configured:
Parameter
Description
Example value
robot_type
Type of the robot, “2D” or “3D”
“3D”
arm_num
Number of arm, positive integer value
3
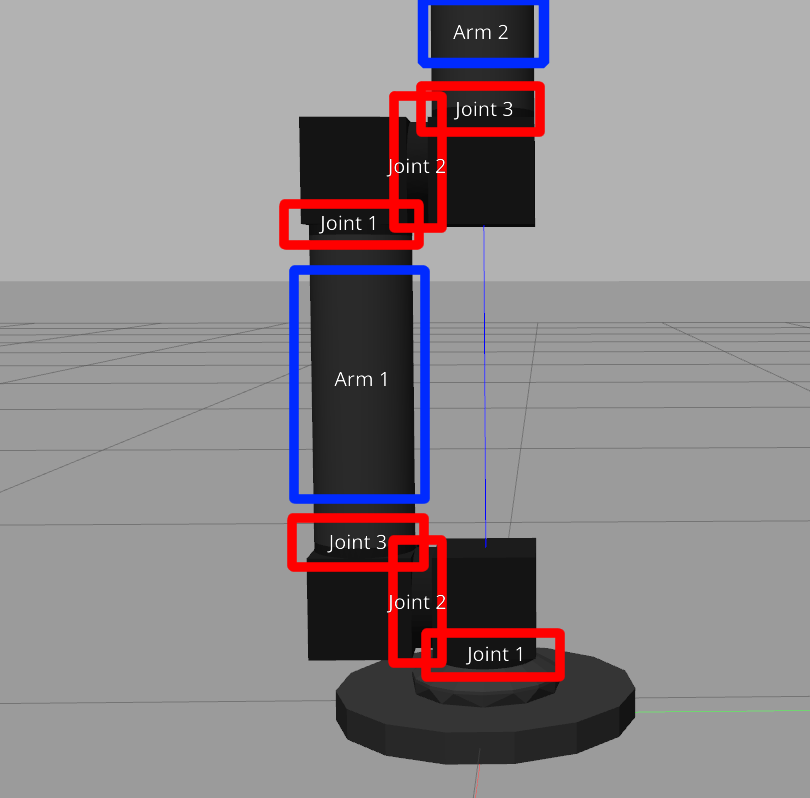
arm_joint_seq
Arm Joint Sequence per arm, 0=Fixed Joint, 1=Revolute Joint
[[1,1,0],[0,1,0],[0,1,0]]
arm_length
Length of each Arm, list of positive floating value
[0.2, 0.2, 0.2]
arm_mass
Mass of each arm, list of positive floating value
[9, 2, 2]
adapter_mass
Mass of Adapter (connection between arm), positive floating value
5
eef_dummy
Display dummy ball on the end effector point, boolean value
False
max_iterations
Max cycle per episode, positive integer value
20
task_and_robot_environment_name
The name of the environment task registered on gym
‘MultiGeoRobotReach-v0’
For the joint sequence explanation is shown on the figure below.
The configuration will automatically build the robot model based on the above configuration. Below are the general parameters information regarding the Multi Geometry Robot environment.
Parameter
Value
Agents
1
Native Source
MLPro
Action Space Dimension
[predefined by the configuration,]
Action Space Base Set
Real number
Action Space Boundaries
[-0.1, 0.1]
State Space Dimension
[6,]
State Space Base Set
Real number
State Space Boundaries
[-2.0, 2.0]
Reward Structure
Overall reward
Action space
The action of the agent directly affects the joint angles (rad) of the robot. The action is interpreted as increments towards the current value. The number of action depends on above configuration.
State space
The state space consists of position information of the end effector (Red Ball) and the target location (Blue Ball).
Element
Parameter
Boundaries
PositionX
m
[-2.0, 2.0]
PositionY
m
[-2.0, 2.0]
PositionZ
m
[-2.0, 2.0]
Targetx
m
[-2.0, 2.0]
Targety
m
[-2.0, 2.0]
Targetz
m
[-2.0, 2.0]
Reward structure
distance = np.linalg.norm(np.array(observations[:3]) - np.array(observations[3:])) ratio = distance/self.init_distance reward = -np.ones(1)*ratio reward = reward - 10e-3 if done: reward += self.reached_goal_reward
Version structure
Version 1.4.0