Robot Manipulator on Homogeneous Matrix
This robotinhtm environment can be installed via:
import mlpro.rl.pool.envs.robotinhtm
3rd Party Dependencies
PyTorch
NumPy
Overview
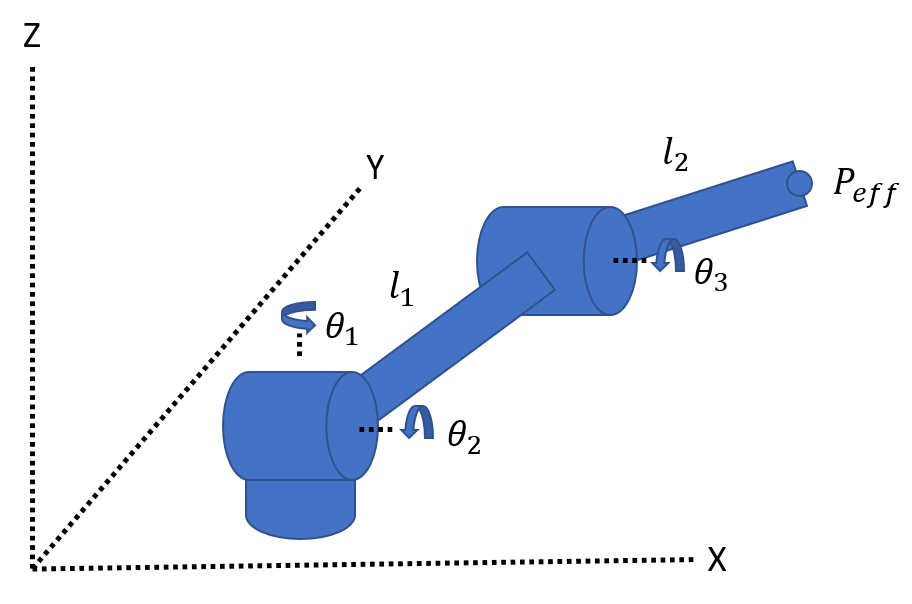
This environment represents the robot manipulator in term of mathematical equations. The mathematical equations are based on rigid body transformation. In this case, the Homogeneous Transformation Matrix (HTM) is used for the structure. HTM is a matrix that contains both the translation rotation of a point with respect to some plane.
\[\begin{split}H=\begin{bmatrix} \mathbf{Rot}& \mathbf{Trans}\\ \mathbf{0} & 1 \end{bmatrix} = \underbrace{\begin{bmatrix} \mathbf{I} & \mathbf{Trans}\\ \mathbf{0} & 1 \end{bmatrix}}_{translation} \underbrace{\begin{bmatrix} \mathbf{Rot} & \mathbf{0}\\ \mathbf{0} & 1 \end{bmatrix}}_{rotation}\end{split}\]
General information
Parameter
Value
Agents
1
Native Source
MLPro
Action Space Dimension
[4,]
Action Space Base Set
Real number
Action Space Boundaries
[-pi,pi]
State Space Dimension
[6,]
State Space Base Set
Real number
State Space Boundaries
[-inf,inf]
Reward Structure
Overall reward
Action space
By default, there are 4 action in this environment. The action space represents the angular velocity of each joint of the robot manipulator.
State space
The state space consists of end-effector positions (x,y,z) of the robot manipulator and target positions (x,y,z).
Reward structure
By default, the reward structures are shown in the following equation:
\[reward=-1*\frac{distError}{initDist}-stepReward\]
Version structure
Version 0.0.0 : Initial version release in MLPro v. 0.0.0???
If you apply this environment in your research or work, please kindly cite the following related paper:
@article{NoName2021 }